








Hangzhou, China / June 19, 2020 Recently, Dahua Technology’s AI-based Visual Tracker obtained the first place in the comprehensive accuracy ranking of the Generic Object Tracking Benchmark (GOT-10k), surpassing other first-class AI companies and top academic research institutions. At the same time, this achievement broke the current tracking algorithm SOTA (state-of-the-art) standard in the OTB2015/VOT2018/VOT2019 data set, which indicates Dahua Technology’s leading position in the field of visual object tracking.
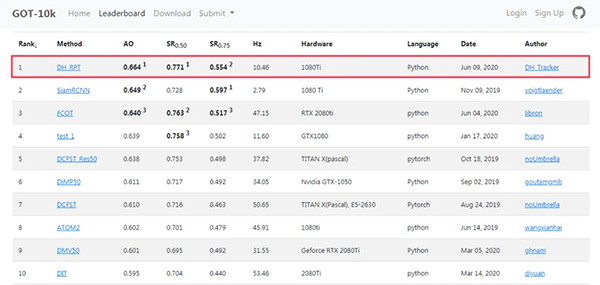
Dahua Technology’s Visual Object Tracking Algorithm (DH-RPT) ranked 1# on GOT-10k
About GOT-10k
The GOT-10k data set is a general object tracking algorithm evaluation data set with international authority. It is published and maintained by the Intelligent System and Engineering Research Center of the Institute of Automation, Chinese Academy of Sciences (CASIA). Among the data set, the training set is composed of 10,000 video sequences, including 563 target categories and 87 motion patterns. The test set is composed of 180 video sequences, including 84 target categories and 32 motion modes. The target categories of the training set and the test set do not overlap, and unified training data is required for algorithm evaluation, which is extremely challenging and attracts participation of scholars and well-known academic institutions both local and overseas.
About Object Tracking Algorithm
This algorithm simulates the human eye's ability in object motion estimation and tracking. It is responsible for outputting the position and distribution of an object in subsequent frames according to its initial position, while adapting to changes in camera angle, environment, influence of obstructions, surrounding disturbances and other factors. It can be widely used in video monitoring analysis, man-machine interaction, intelligent driving, robotics and other fields.
In order to achieve accurate tracking of moving objects in a complex environment, the RSIA team of Dahua Technology innovatively used a set of representative points instead of bounding box for target state estimation, thereby achieving more fine-grained localization and modeling of object appearance. As for the framework, two parallel branches were used. Combined with multi-layer aggregation strategy, it effectively obtained detailed structural information of target and high discriminative power when handling distractors.
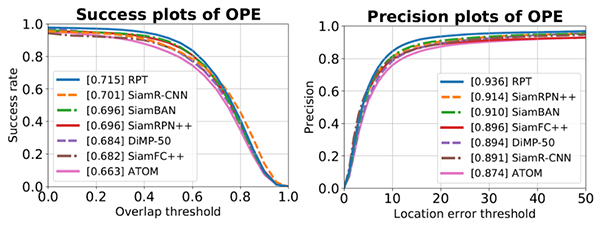
Algorithm evaluation results based on OTB2015 dataset
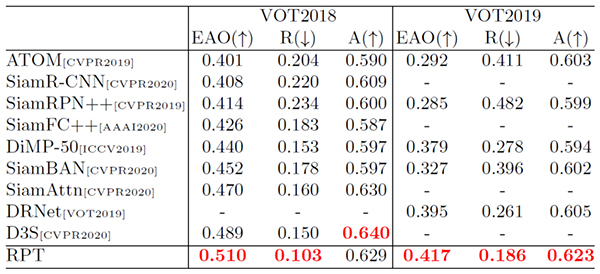
Algorithm evaluation results based on VOT2018/VOT2019 dataset
Applications in Dahua products

Autonomous Tracking of UAV
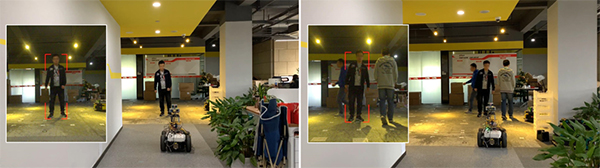
Autonomous Tracking of Robots


